Bei diesem Verfahren wird zunächst ein Pilotrohrstrang bodenverdrängend oder -entnehmend gesteuert vorgetrieben. Die Vermessung wird mit einem Theodolit mit elektronischer Kamera durchgeführt. Richtungsänderungen werden durch die Steuerfläche an der Pilotspitze unter Zuhilfenahme der Reaktionskraft des Baugrundes vorgenommen. Nachfolgend werden Mantel- oder Produktrohre gleichen oder größeren Außendurchmessers bei gleichzeitigem Herauspressen oder -ziehen der Pilotrohre vorgetrieben. Größere Außendurchmesser erfordern eine Aufweitung durch Bodenverdrängung oder -entnahme in einem oder mehreren Arbeitsgängen.
Die Pilotrohrvortriebe für den gesteuerten Leitungstunnelbau verdrängen immer mehr die Microtunneling-Anlagen. Waren bisher im Pilotbohrverfahren Längen von 50 -60 m üblich, so sind durch die Neuentwicklungen Längen bis 120 m und Durchmesser bis 1200 mm möglich.
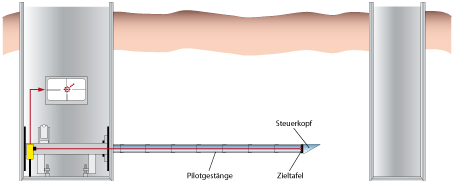
Schritt 1:
Gesteuerte Bohrung mit Pilotrohren in verdrängungsfähigem Boden.
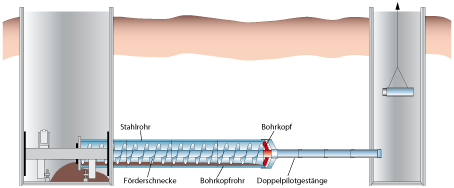
Schritt 2:
Am Pilotrohr orientierte Aufweitungsbohrung mit Stahlschutzverrohrung und Bodenförderung in den Startschacht.
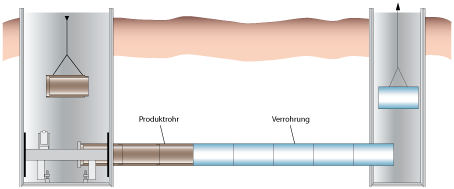
Schritt 3:
Nachschieben der Produktenrohre gleichen Außendurchmessers.
Alternativer Schritt 3:
Aufweitungsbohrung mit direkt angetriebener Aufweitungsstufe und Bodenförderung in den Zielschacht und gleichzeitigem Pressen der Produktenrohre.
Mess- und Steuersystem
Das optische Vermessungssystem besteht aus einem Theodolit mit elektronischer Kamera, einer LED-Zieltafel, die im Pilotsteuerkopf montiert ist und in einem Monitor, der dem Maschinenfahrer im Startschacht die Position und Stellung des Pilotsteuerkopfes anzeigt. Bei Erkennen einer Abweichung von der auf dem Monitor angezeigten Sollbohrrichtung, wird mit Hilfe der Steuerspitze eine Steuerkorrektur vorgenommen.